引力波为探索和认识未知世界提供了新的重要途经和手段,空间引力波探测是世界各国竞争的科学前沿。中国科学院力学研究所作为太极计划的核心参与团队开展了空间引力波探测所需的多项关键技术研究,突破了皮米级激光干涉测量技术及高精度弱力测量技术、搭建了纳弧度级激光捕获跟瞄一体化地面模拟系统、研制了国内首套光粘干涉仪样机,力争实现国际空间引力波探测的首次突破。
当我们仰望天空,苍穹上的点点星光总让人着迷;当我们望向远方,生命来自何处又归向何方的思绪亦常涌上心头。茫茫宇宙珍藏了世间美好又埋藏了无数秘密,为窥探其中的奥秘,人类从未停止探寻天空的脚步,人造卫星、射电望远镜、空间站、载人航天让我们一步一步拉近与宇宙间的距离,然而暗能量、暗物质、黑洞起源、早期宇宙相变等传统探测手段无法观测的现象又一次次见证了我们的渺小。幸运的是,引力波为探索和认识未知世界提供了新的重要途经和手段。如果说电磁波让我们看到了浩瀚的星空,那么引力波就让我们听到了来自宇宙的声音。
引力波是爱因斯坦广义相对论中最重要的预言之一,由物质和能量的剧烈运动和变化所产生,在行进过程中挤压或者拉伸时空,类似于水面泛起的涟漪一般,以光速向外传播。引力波提供了有别于电磁波的全新的观测宇宙的窗口,通过引力波探测将可能揭开暗能量和暗物质的神秘面纱,为我们呈现一幅更完整的宇宙图景,同时为揭示引力本质、发现引力子和探索大统一理论提供了一个不可替代的途径。相较于电磁波而言,引力波与物质之间作用十分微弱,可以没有能量损耗地穿透任何物质。对于深空及极端条件探测,如大质量黑洞合并、超新星引力坍缩、致密双星系统、大爆炸留下的背景辐射等,引力波将成为有力的探测手段。因此,引力波被称为物理学皇冠上的明珠,是科技强国竞争的科学前沿。
然而由于引力波信号非常微弱,探测难度极大,从爱因斯坦提出预言开始整整100年的时间里,各国科学家们经过了无数次的尝试,终于在2016年通过美国的地面引力波探测天线LIGO成功实现了人类历史上首次引力波信号的探测。受限于地面噪声及地面实验尺度的限制,LIGO仅能测量10赫兹以上高频段的引力波信号,而0.1毫赫兹 ~1赫兹的中低频段具有极其丰富的波源,具有更深刻的宇宙学和天文学意义,对应更重要的科学价值和应用前景。空间引力波探测可摆脱地面实验的限制,在太空开展百万公里级精密激光干涉测量,实现中低频引力波信号的探测,是世界各国逐鹿的下一个科技制高点,但也将面临比地面探测更大的技术挑战。

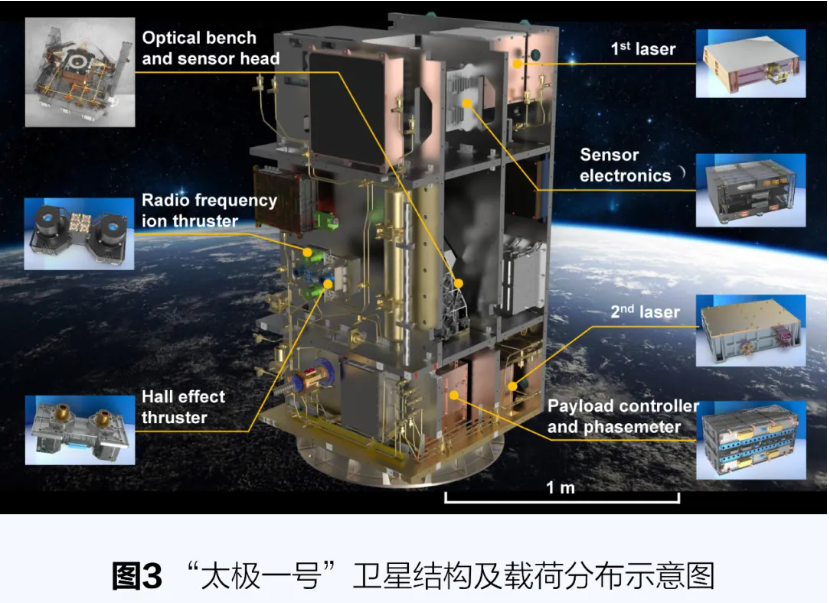
太极计划是由中国科学院牵头发起的空间引力波探测计划,拟发射3颗卫星在太空构建300万公里臂长等边三角形编队,卫星间两两通过激光建立连接。当引力波信号经过时会引起时空的弯曲进而改变光束在两测量点间传输的距离,利用高精度激光干涉仪对这个距离变化进行读出即可实现引力波信号的反演,有望实现国际上首次中低频段引力波信号的探测。然而测量原理看似简单,实现起来却困难重重,测量技术的发展将起到决定性的作用。中国科学院力学研究所作为太极计划的核心参与单位,在国家重点研发计划的长期支持下,致力于推动我国空间引力波探测事业的发展,与中国科学院大学、国科大杭州高等研究院、中国科学院长春光学精密机械与物理研究所、中国科学院上海技术物理研究所、中国科学院微小卫星创新研究院等单位组成研究团队,深入开展空间引力波探测科学载荷研究,突破了皮米级位移测量、纳弧度级角度测量和高精度惯性基准构建等技术难题,参与研制的“太极一号”实验卫星迈出了中国空间引力波探测的第一步。
分毫不差的精确:激光干涉仪
为了在空间中探测微弱的引力波信号,需要在百万公里量级的距离上分辨出皮米级的位移变化,相当于在10倍地月距离的尺度下分辨一个原子尺寸的百分之一,形容为大海捞针真是毫不夸张。常规的测量手段显然难以实现如此高的测量精度,因此我们考虑采用一把特殊的尺子——激光。激光的波长通常为百纳米至微米量级,构建激光外差干涉仪提取干涉信号的相位,可对波长进一步细分,是目前实现皮米级位移分辨的有效手段。因此,空间引力波探测以激光外差干涉作为其核心测量方法学,激光干涉仪则是实现测量的主要器件。
激光干涉仪主要由激光器、光学平台及相位计3部分组成,激光由激光器发出后通过不同功能的光学镜片引导,在光学平台上形成不同功能的干涉仪,其中一路通过望远镜发射,传播300万公里的距离后到达远端卫星,与远端卫星搭载的干涉仪本地光束进行干涉,之后由相位计测量拍频信号的相位以此来反演光程变化。为了实现皮米级位移分辨,干涉测量系统中任何一点微小的扰动都可能像扇动翅膀的蝴蝶一般对测量精度产生严重影响。由此可以看出,皮米级激光干涉仪的核心问题在于溯源噪声、了解噪声与抑制噪声。
在激光干涉仪研究方面国外起步较早,经过20多年的技术积累,目前对空间引力波探测激光干涉仪系统的认识已较为清晰,对限制干涉仪测量精度的各类噪声分别进行了较为细致的建模与验证,并且进行了较为严谨的实验验证,对各类噪声的基本性质进行了全面分析并研制了多套不同功能的激光干涉仪。国内方面起步相对较晚,在国外核心器件及技术封锁的背景下,太极团队独立开展研究,目前已取得了重大突破。
在激光干涉仪系统噪声分析方面,研究团队以皮米级激光测距指标为顶层指标,对组成部分各单机载荷进行逐步剖析,建立了太极计划干涉仪系统的噪声指标体系。研究表明,激光器的频率抖动、卫星平台的振动、光学平台的热胀冷缩、干涉仪受到的应力变化、探测器的背景噪声、光学系统的杂散光等看似微小的扰动均会对皮米级测量精度产生不可忽视的影响。以上述研究为基础,团队进一步分析了噪声影响机制,对主要噪声分别进行了建模与验证,从主动抑制、共模噪声消减和数据后处理3个方面开展了噪声抑制方案研究,提出了激光干涉测量系统构建方案。
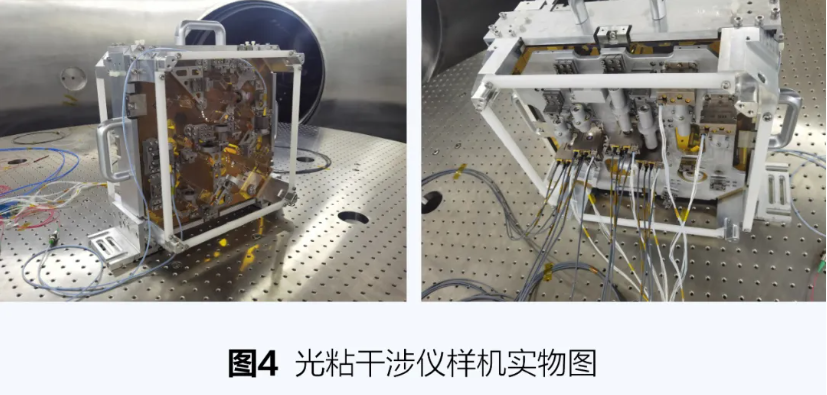
而在激光干涉仪研制方面,研究团队完成了国内首套光粘干涉仪样机研制。所谓的光粘是一种通过构建不同材料间共价键的方式实现玻璃基板与光学镜片间无应力粘接的技术,利用光粘技术,玻璃镜片就像是从基板上“生长”出来一样,二者成为一个整体。之所以采用这样的技术,主要是因为可以在保证足够的结构强度和可靠性的同时极大程度提高系统的结构和热稳定性,避免材料热胀冷缩产生的光程噪声对皮米测量精度的影响。除采用光粘技术外,所研制的激光干涉仪采用一体化设计,充分考虑了多功能复用,不仅具备三路干涉测量,还具备激光通信、对钟、超前指向、Backlink等辅助功能。目前利用光粘干涉仪样机及自主研发的16通道相位计,实现了毫赫兹频段皮米甚至优于皮米量级的地面测试精度。
百步穿杨的精准:激光捕获跟瞄系统
激光干涉仪进入工作模式是建立在3颗卫星彼此间激光光束对准的前提下。受限于导航定位精度,3颗卫星进入预定轨道后各自的激光干涉仪并不能直接“看”到对方;不仅如此,激光干涉仪还不满足于“看”到彼此,它们需要对方的眼里只有自己。干涉仪平台间光束的指向抖动需被控制到纳弧度量级以保证皮米级干涉测量精度,这相当于从地球上投篮投进月球上一个篮筐的小角度。为此,太极计划卫星上配备了专门的激光捕获跟瞄系统,以实现百步穿杨般的精准。然而,太极计划对激光捕获跟瞄系统的需求还远不止超高的精准。由于光束在自由空间中传输了300万公里的距离,在接收卫星处光束会因发散而变得非常大,进入接收卫星内的光仅占整个光束的一小部分,经估算光功率仅有百皮瓦量级,因此捕获跟瞄系统还需要在“黑暗”的条件下工作。
为了完成如此艰巨的任务,目前太极计划拟采用三级捕获探测方案。第一级采用星敏感器确定卫星姿态,实现光束的初始指向。星敏感器虽然精度远远达不到纳弧度级角度分辨率,但因其视场很大可进行大范围探测,非常适用于初始指向阶段。第二级采用电荷耦合器件(CCD)或互补金属氧化物半导体(CMOS)捕获相机进行扫描探测,初始指向后两个卫星的方向被限制在一个较小的范围内,我们称其为不确定区域。调整卫星姿态可使光束对不确定区域进行完整的扫描,在某一时刻光束将进入接收卫星并在其捕获相机上成像一个光斑,我们计算光斑中心的位置,并将其与地面标定好的相机参考位置进行比较,由此可推算出光束的指向偏差,依此来调整卫星姿态即可完成光束的捕获过程。捕获相机相比星敏感器虽然视场较小,但其探测灵敏度更高,可进一步缩小不确定区域至第三级探测器视场之内。然而,截至目前纳弧度级的测角需求依然没能满足,重任落到了第三级探测器即四象限探测器的肩上。通常来说,四象限探测器利用各象限间光强的差异来计算角度偏差,但这种强度敏感的方案因暗电流噪声的影响难以达到要求。太极计划考虑采用一种称为差分波前传感的技术,利用各象限探测的干涉信号,通过对波前偏差进行分辨来实现纳弧度级的测量分辨率,依此来调整卫星姿态即可完成光束的高精度跟瞄。
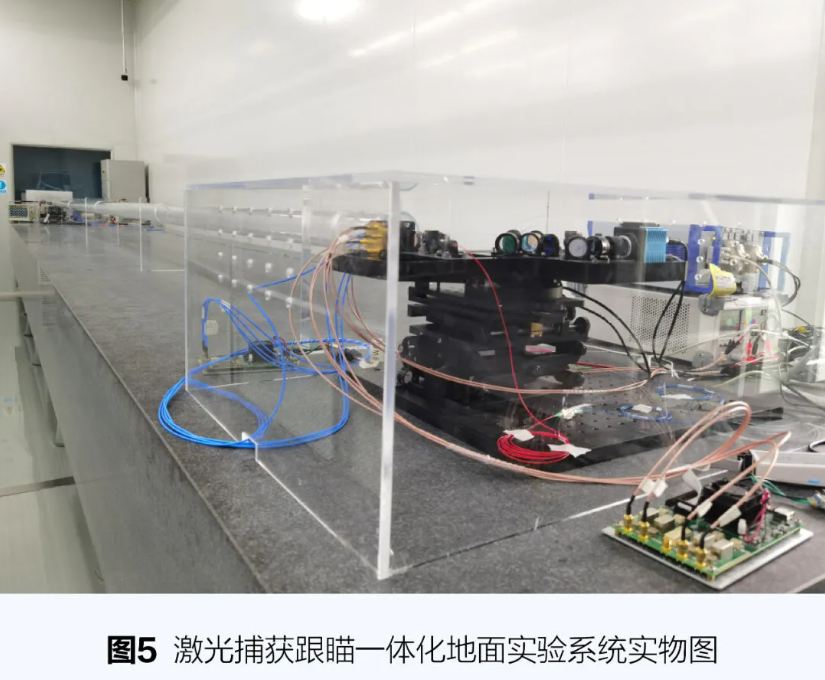
可以看出,纳弧度级的激光捕获跟瞄不仅依赖于高精度角度测量技术,还依赖于各个探测阶段间的配合,研究团队针对上述两方面均开展了研究。在测量技术方面,分析了捕获相机背景噪声对光斑中心定位精度的影响,设计了适用于弱光探测的高精度质心算法;分析了跟瞄阶段采用的差分波前传感技术的非线性特性及零偏特性对链路建立过程的影响,提出了捕获跟瞄光学系统设计方案;在整体方案验证方面,搭建了国际首个空间引力波探测激光捕获跟瞄一体化地面实验系统,实验系统可在充分模拟在轨运行工况的情况下,实现激光捕获跟瞄全流程自动模拟。实验获得的激光捕获精度优于1 微弧度,跟瞄精度在毫赫兹频段达到纳弧度水平,均可满足太极计划要求,充分验证了捕获跟瞄测量方案及技术的可行性。
不动如山的稳定:惯性传感器
前文我们提到,空间引力波探测是根据空间中两个测量点间光束传播的距离变化来反演引力波信号的。激光干涉仪提供了位移测量手段,激光捕获跟瞄系统保障了干涉仪的正常工作,现在我们需要考虑的问题是去哪里找测量点呢?为测量微弱的引力波信号,测量点需要尽可能避免其他物理耦合因素引入的相对位移变化,从而处于极端稳定的自由漂浮状态。实际上,我们需要测量点在 5分钟(一个特征周期)内的质心平均位置漂移仅仅在一个氢原子半径的百分之一水平。然而,即使在非常稳定(甚至是零扰动)的空间环境中,依然广泛存在着太阳光压、宇宙射线及电磁环境等干扰源,而这些干扰足以淹没引力波信号,因此我们需要研究一套用于将这些噪声隔离开的系统,这个系统就是惯性传感器。惯性传感器的主要任务就是保持其内部的检验质量块在空间实现高精度的自由漂浮,使其成为我们需要的稳定的测量点。
惯性传感器是由检验质量、弹簧和阻尼器等组成的最基础的弹簧振子系统,当外部力作用于检验质量时,检验质量的运动状态发生变化,通过测量弹簧的变形或阻尼器的阻尼力可以推导出外部力的大小和方向。其通过惯性原理来实现检验质量的加速度、速度和位置等信息的测量,并将该信息传递给无拖曳控制系统,无拖曳控制系统通过卫星微推进器反向补偿来达到卫星跟随检验质量的目的,从而进一步降低外界噪声的影响。对于空间引力波探测来说,外部噪声极其微弱,因而多采用以电容传感和静电力驱动为基础的测量和控制方法,能够大大提升系统的测量精度,该技术也已经在地球重力场测量等领域得到广泛应用。
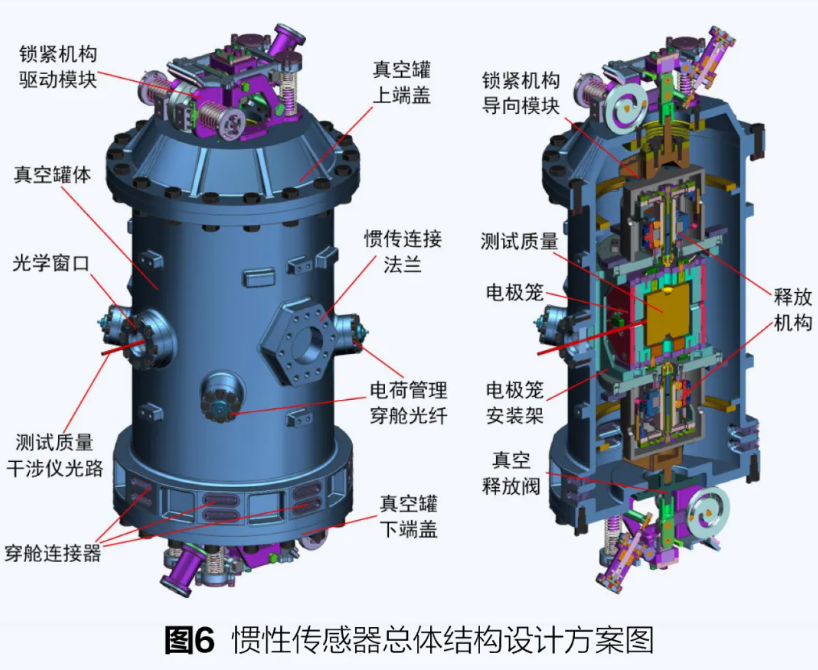
惯性传感器基本原理看似简单,但在实际的研究中,还有方方面面的设计约束条件需要考虑。比如,为了克服发射阶段的环境振动条件对检验质量的破坏性影响,通常系统都会设计一套地面锁紧装置来对其进行锁定,入轨后再以极低的初速度将其释放以便于静电力对其捕获;为了降低穿透飞船到达检验质量的高能粒子,会设置一套电荷管理系统,通过光电效应来中和电荷累积影响;为了精确获取检验质量周围电磁热环境水平,检验质量周围还设置有多种相应的传感器。除此之外,惯性传感器的研制还需要对材料剩磁、系统自引力补偿、热传导等一系列问题展开深入讨论,同时惯性传感器需要工作在具有良好温度梯度的环境下,还配备复杂的温度控制系统。因此,为了能够实现对空间引力波的高灵敏度探测,惯性传感器通过多功能的系统设置和复杂的系统设计来保证检验质量在轨实现近乎完美的自由漂浮状态。
研究团队针对惯性传感器相关关键技术开展了一系列攻关工作。其中,高精度电容传感与静电控制技术部分,实现了在毫赫兹频段静电驱动控制稳定性优于百万分之一的超高精度水平,首次提出并构建了全自由度电容传感标定系统;完成了检验质量和电极笼样机研制,集成后轴间串扰耦合优于万分之一;同时搭建了超高精度扭秤弱力测量地面验证系统。这些成果为实现空间引力波探测超高精度惯性传感器的顺利研制打下了坚实基础。

未来,项目团队将继续发展激光干涉测量、激光捕获跟瞄及惯性传感等关键技术,攻歼皮米级星间干涉测距、高精度弱光锁相、高精度电容传感与静电伺服控制等技术难题,助力“太极二号”三星系统研制,推动系统由方案研制阶段转入工程实施阶段,力争实现国际首次百万公里距离星间激光干涉测距实验及国际空间引力波探测的首次突破。
致谢:感谢国家重点研发计划“引力波探测”重点专项“星间激光干涉测量系统分析与设计”(项目编号:2020YFC2200100)、青年项目“时钟频率噪声消除技术研究”(项目编号:2023YFC2206200)、“星间激光干涉与平台耦合机理半物理仿真技术”(课题编号:2021YFC2202902)、“光链路系统模型建立与耦合噪声分析”(课题编号:2022YFC2203702)、“惯性传感器地面综合评价方法”(课题编号:2020YFC2200601)的支持。
本文刊登于IEEE Spectrum中文版《科技纵览》2024年2月刊。
专家简介
高瑞弘:中国科学院力学研究所助理研究员。
王少鑫:中国科学院力学研究所特别研究助理。
刘河山:中国科学院力学研究所特聘骨干研究员,重点研发计划青年项目负责人。
齐克奇:中国科学院力学研究所副研究员。
李 磐:中国科学院力学研究所副研究员,重点研发计划课题负责人。
徐 鹏:中国科学院力学研究所研究员,重点研发计划课题负责人。
罗子人:中国科学院力学研究所特聘核心研究员,中国科学院微重力重点实验室副主任,国科大杭州高等研究院引力波宇宙太极实验室副主任,空间引力波探测太极计划首席科学家助理,国家重点研发计划项目首席。
原文链接:https://mp.weixin.qq.com/s/u19JJZv6oEIhTy0vQ488Mw